-
موضوع مميز
- #21
ان امكن استاذنا، لمحه شامله عن المحركات المستخدمه مواصفاتها وانواعها مع جدول مقارنة بين الانواع لان قوة المحرك لها دور مهم بالحموله والسرعه (وشدة الاصطدام بالهدف) والمناوره وتحمل للظروف الجويه وحفظ الطاقه... الخ

قم بمتابعة الفيديو أدناه لمعرفة كيفية تثبيت موقعنا كتطبيق ويب على الشاشة الرئيسية.
ملاحظة: قد لا تكون هذه الميزة متاحة في بعض المتصفحات.






volume = pi * radius^2 * height
pi x (22/2)^2 x 7 = 2660.93
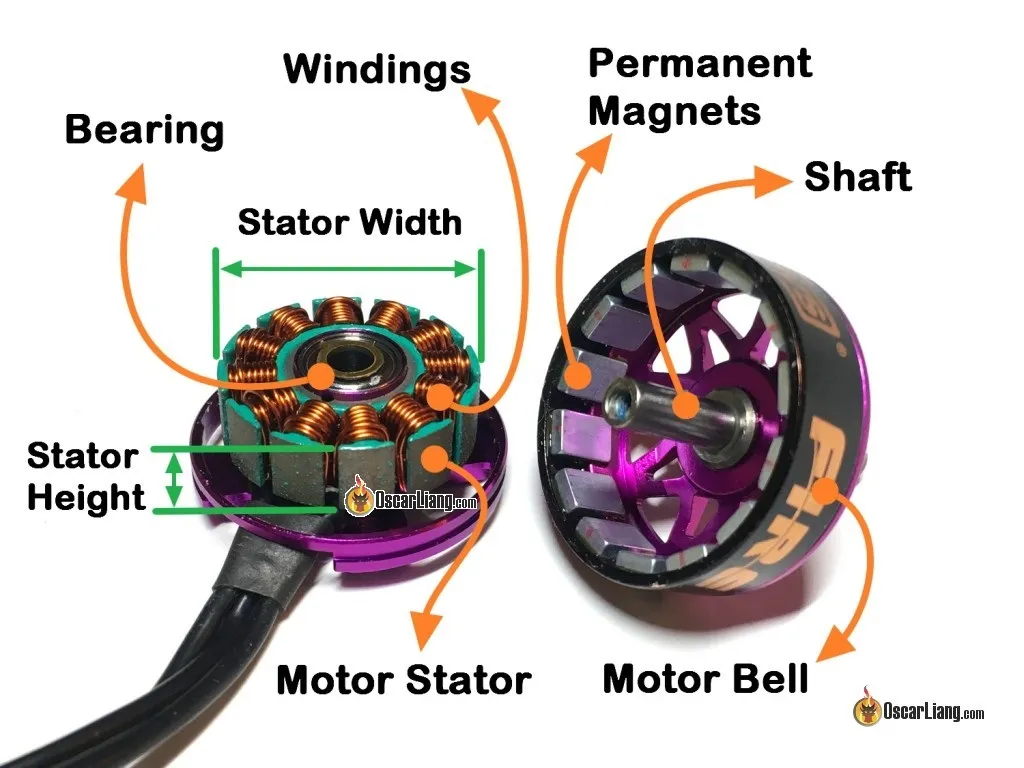
يتم تحديد KV المحرك بعدد لفات الأسلاك النحاسية في الجزء الثابت. بشكل عام، العدد الأكبر من لفات الملفات يقلل من كيلوفولت المحرك، في حين أن عدد اللفات الأقل يزيده. يمكن أن تؤثر القوة المغناطيسية للمغناطيس أيضًا على قيمة KV، حيث تزيد المغناطيسات الأقوى من KV.

موضوع شيق وجهد طيب من صاحب الموضوعالبرامج الثابتة للتحكم في الطيران :
عندما يتعلق الأمر بوحدات التحكم في الطيران، فلديك خيار ليس فقط في الأجهزة ولكن أيضًا في البرامج الثابتة. توفر خيارات البرامج الثابتة المختلفة ميزات وتخصصات مختلفة لمختلف التطبيقات. على سبيل المثال، تم تصميم iNav مع وضع نظام تحديد المواقع العالمي (GPS) والطيران المستقل في الاعتبار، بينما يركز Betaflight بشكل أكبر على أداء الطيران.
Betaflight: تركز هذه البرامج الثابتة مفتوحة المصدر على أداء الطيران. لديها أكبر قاعدة مستخدمين، مما يجعل البدء أسهل بسبب وفرة البرامج التعليمية. وهذا يعني أيضًا أن الدعم متاح بسهولة عندما تواجه مشكلات.
بالإضافة إلى ذلك، تدعم Betaflight أكبر مجموعة من وحدات التحكم في الطيران.
iNav: إذا كنت مهتمًا أكثر بالطيران الآلي ومهمة إحداثية نظام تحديد المواقع العالمي (GPS)، فإن iNav هو الحل الأمثل.
بمجرد اختيار البرنامج يمكن بعد ذلك البحث عن لوحة تحكم الطيران المتوافقة.
يمكن تكوين البرامج الثابتة لوحدة التحكم في الطيران باستخدام جهاز كمبيوتر أو هاتف ذكي أو وحدة تحكم لاسلكية. يحتوي كل برنامج ثابت على واجهة مستخدم خاصة به (UI) ومعلمات يمكن تغييرها. ومع ذلك، حتى واجهات المستخدم المتشابهة يمكن أن تنتج خصائص طيران مختلفة اعتمادًا على البرنامج الثابت، لذلك يستغرق الأمر وقتًا للتعلم والتكيف مع واحدة جديدة.
"الضبط Tuning" هو المصطلح الذي نستخدمه في الهواية لوصف عملية ضبط المعلمات مثل PID و rates/expo وغيرها لتحقيق خصائص الطيران المطلوبة. هذه خطوة مهمة في تحسين أداء الطائرة بدون طيار FPV وتحقيق أقصى استفادة من وحدة التحكم في الطيران.
المعالجات :

تستخدم وحدة التحكم في الطيران وحدات التحكم الدقيقة (MCU) لتخزين رموز البرامج الثابتة وإجراء حسابات معقدة.
حاليًا، يتم دعم وحدات STM32 MCU مثل F4 وF7 وH7 بواسطة Betaflight، بينما لم يعد F1 وF3 مدعومين بسبب عدم كفاية الذاكرة لمتطلبات البرامج الثابتة الموسعة. لذلك، من المهم الانتباه إلى الذاكرة المتوفرة على المعالجات المختلفة - فهي لا تقل أهمية عن السرعة، إن لم تكن أكثر. على سبيل المثال، على الرغم من أن أحدث إصدار من Betaflight يسمح بتحديد الميزات التي تريد استخدامها والحفاظ على حجم الرمز صغيرًا للمعالجات ذات الذاكرة الأقل، إلا أنه على المدى الطويل، قد يتمتع F405 الأبطأ بميزة على F722 الأسرع نظرًا لسعة الذاكرة الأكبر الخاصة به .
تاريخيًا، هيمنت رقائق STM32 على سوق أجهزة التحكم في الطيران بدون طيار FPV. ومع ذلك، في السنوات الأخيرة، أصبح AT32 سريعًا بديلاً قابلاً للتطبيق لرقائق STM32 نظرًا لتوفره وسعره المناسب.
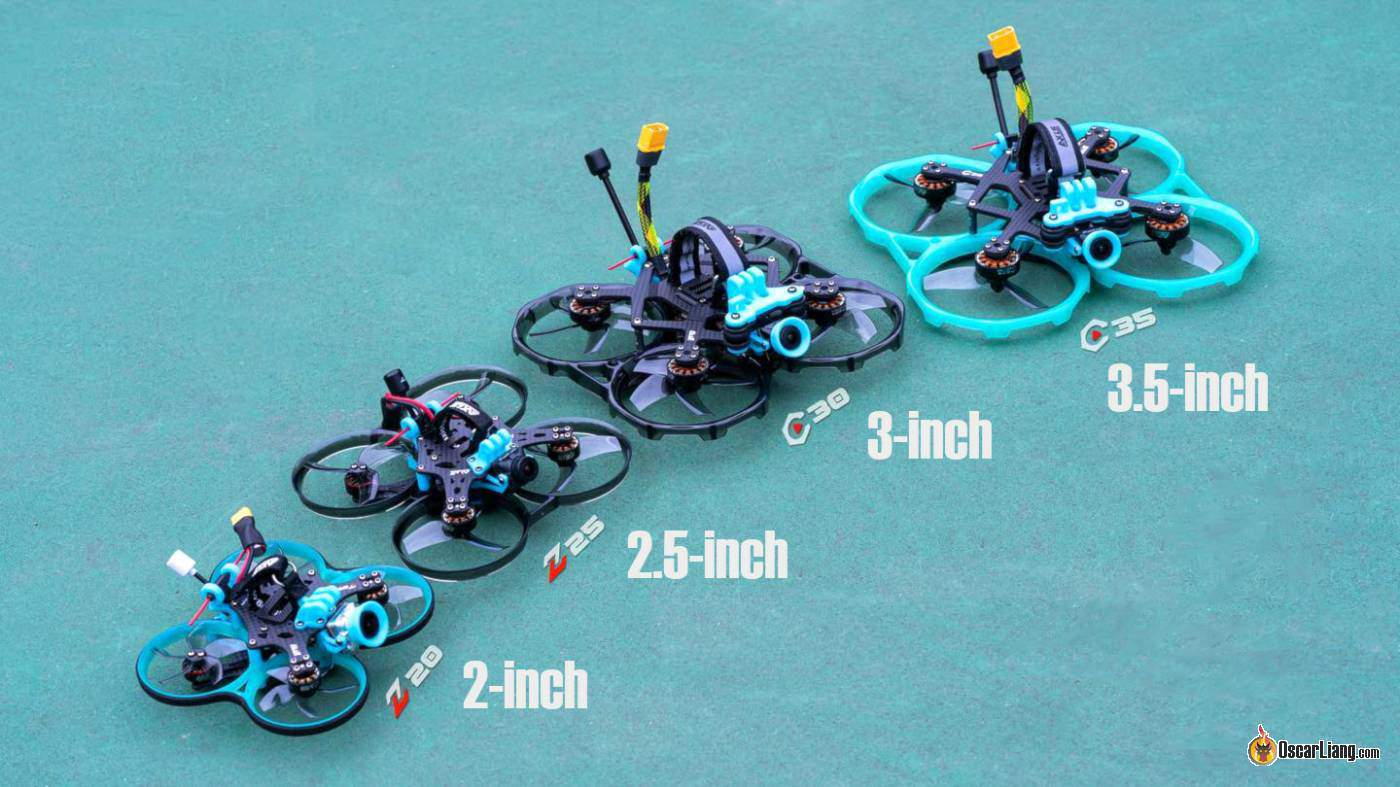
حجم الإطار | حجم المروحة | حجم المحرك | KV |
150 ملم أو أصغر | 3" أو أصغر | 1105 -1306 أو أصغر | 3000 كيلو فولت وما فوق |
180mm | 4″ | 1806, 2204 | 2600KV – 3000KV |
210mm | 5″ | 2205-2208, 2305-2306 | 2300KV-2600KV |
250mm | 6″ | 2206-2208, 2306 | 2000KV-2300KV |
350mm | 7″ | 2506-2508 | 1200KV-1600KV |
450mm | 8 بوصة، 9 بوصة، 10 بوصة أو أكبر | 26XX وأكبر | 1200 كيلو فولت وأقل |


عدد جيد ،، يتطلب برنامج ادارة الاسراب لمهاجمة رتل او تشكيل قتالي كامل من خلال مشغل واحد !!! ... انت مطالب اخي ببرامج ادارة الاسراب سواء بموجه او تلقائي (ان وجد!) ... لاعطاء ال software حقه وللتقدم خطوه عن الاستخدام التقليدي لدرونات ال FPV واكيد جزء من التغطية لموضوع ال FPV... شرق اسيا ذهبت بعيدا بادارة اسراب الدرونات على الاقل ال micro drones ولكن ضمن المجال المدني ... مع كل الشكر والتقدير لجهدكم وابداعكم.
فكرة ممتازه ! نوعين من الرووس الحربيه EFP و FRAG متشظي مضاد للاشخاص وايضا هوائيات الرادارات وال soft targets in general.... كما يمكن الجمع بين النوعين براس حربي واحد "متشظي وخارق" ... او برمجة الراس الحربي setting حسب نوع الهدف واطلاقه للمهمه ... يبقى الامر متروك لابداع وخيال المصمم والمصنع ... @anwaralsharrad
STM التركيه، شركة رائده بمجال الاسراب بالمنطقه على الاقل حسب المعلن ... لاجديد منهم منذ 4 سنوات على فديو الاسراب هذا :عدد جيد ،، يتطلب برنامج ادارة الاسراب لمهاجمة رتل او تشكيل قتالي كامل من خلال مشغل واحد !!! ... انت مطالب اخي ببرامج ادارة الاسراب سواء بموجه او تلقائي (ان وجد!) ... لاعطاء ال software حقه وللتقدم خطوه عن الاستخدام التقليدي لدرونات ال FPV واكيد جزء من التغطية لموضوع ال FPV... شرق اسيا ذهبت بعيدا بادارة اسراب الدرونات على الاقل ال micro drones ولكن ضمن المجال المدني ... مع كل الشكر والتقدير لجهدكم وابداعكم.