منذ أن بدأ الإنسان البدائي في التجول والترحال محاولاً اكتشاف أرجاء الكرة الأرضية، وهو يبحث عن وسيلة تساعده في إمكانية تحديد موقعه من جهة، وتحديد اتجاهه، وإلى أين أخذه التجوال من جهة أخرى. فكان يعتمد على تعيين مساره ودروبه بواسطة علامات من أكوام صغيرة من الحجارة، إلاّ أن هذه الوسيلة يمكن أن تنجح في نطاق صغير، إضافة إلى أنها يمكن أن تُزال حينما يتساقط الجليد أو تهطل الأمطار.
وازدادت المشكلة سوءاً حينما بدأ الإنسان في اكتشاف المحيطات، حيث أنه لا يوجد مكان لوضع العلامات الحجرية، ولا علامات أرضية يسترشد بها، وكانت النجوم هي وسيلته الوحيدة التي يعتمد عليها، لكنها بعيدة جداً، إضافة إلى اختلاف درجة وضوحها من موقع إلى آخر، ومن ثم فإن الطريقة الوحيدة للاستفادة منها هو استحداث طرق دقيقة للقياس، وبالطبع فإن أجراء مثل هذه القياسات لا يتم إلاّ في الليل، وفي الليالي الصافية الخالية من السحب فقط، وباستخدام أدق أجهزة القياس، وعلى الرغم من ذلك فإن هذه الأجهزة تعطي نتائج تقريبية بفارق قد يصل إلى الميل بالزيادة أو النقصان.
وحاول الإنسان في العصر الحديث بكل إمكانياته التقنية والتكنولوجية الاعتماد على نُظم متقدمة إلاّ أنه ثمة صعوبات تواجهها. فهناك نظامان هما لوران LORAN، ودكا DECCA يستخدمان في الملاحة البحرية، ويعملان على أساس نظم الراديو التي تعتبر جيدة الاستخدام في النطاقات الساحلية حيث تتوافر شبكات الاتصال بين النظامين، إلاّ أنها لا تغطي مساحات كبيرة من اليابس؛ فضلاً عن أنها تتسم بتفاوت دقتها حسب الاختلافات المكانية.
وهناك نظام جديد يعتمد على الأقمار الصناعية على نمط نظام تحديد المواقع GPS يُعرف بنظام الانتقال Transit System، أو بنظام الملاحة باستخدام الأقمار الصناعية (Sat – Nav)، لكن الأقمار الصناعية التي يستخدمها تدور في مدارات منخفضة، فضلاً عن أنه لا يوجد عدد كبير منها وبالتالي لا يمكن الحصول على نتائج محددة بصفة دائمة بسبب ترددات أجهزتها الصغيرة، كما أن أي تحرك بسيط لجهاز الاستقبال يسبب أخطاء فادحة في تحديد الموقع
أولاً: النظام ومكوناته وحالات استخدامه
1. نظام تحديد المواقع GPS
في عام 1973م بدأ العمل في وزارة الدفاع الأمريكية لتصميم نظام تحديد المواقع، وذلك لاستبدال نظام الملاحة بالأقمار الصناعية المعروف باسم Transit System أو Sat - Nav، وذلك لتفادي عيوبه الممثلة في تغطيته غير الكافية للأقمار الصناعية، وعملياته الملاحية غير الدقيقة. لذا أُستحدث النظام الجديد ليوفر تغطية كاملة وبدقة عالية تغطي الاحتياجات العسكرية. ويتم التحكم في النظام عن طريق القوات الجوية العسكرية، فضلاً عن أن هذا النظام يتوافر للاستخدامات المدنية ويتغلغل في مختلف أوجه الحياة، حيث أن له العديد من التطبيقات الأرضية والبحرية والجوية، كما سيتضح فيما بعد.
وقد تم إطلاق أول قمر صناعي من هذا النوع عام 1978م، ويعتمد هذا النظام على شبكة مكونة من 24 قمراً صناعياً تدور في مدارات على ارتفاع شاهق حول الكرة الأرضية، وتبدو كأنها نجوم صناعية Man - Made Stars تحاول أن تحل محل النجوم الطبيعية التي كان يعتمد عليها في الملاحة
 مركز تحميل صور
مركز تحميل صور
وتتوزع هذه الأقمار الصناعية في مداراتها المخصصة لها بزوايا ومسارات وزمن محدد لكل منها، بحيث يمكن الاتصال مع أربعة أقمار صناعية على الأقل في أي مكان من العالم.
واستحق هذا النظام ما أُنفق عليه فهذه الأقمار الصناعية تدور على ارتفاعات شاهقة مما يجعلها تتفادى المشاكل والمصاعب التي كانت تواجه محطات التوجيه الأرضي، فضلاً عن أنها تعطي نتائج عالية الدقة في تحديد المواقع على سطح الأرض على مدار 24 ساعة يومياً، إذ أنها يمكن أن تعطي قياسات دقيقة للغاية، حيث يمكـن للمساحيين Surveyors باستخدام أجهزة تحديد المواقعGPS الحصول على قياسات تصل دقتها إلى أقل من السنتيمتر الواحد وهو ما تفتقده الأجهزة المساحية التقليدية.
وأفضل ما تتيحه هذه التقنية الحديثة هو إمكانياتها، ورخص سعرها، وصغر حجمها، وسهولة الحصول عليها، ويمكن القول إنه تم إنجاز إحدى احتياجات الإنسان، حث ستصبح هذه الخدمة من الأساسيات كالهاتف مثلاً، حيث إنها تُمكن المُستخدم من معرفة موقعه في أي مكان وفي كل وقت، إضافة إلى أن هذه الخدمة الجديدة سوف تساعد سيارات الطوارئ من تأدية عملها بسرعة أعلى وبدقة أكبر، حيث إنها ستزود بخرائط إلكترونية Electrons Maps توضح لها مسارها نحو الهدف.
2. مكونات جهاز تحديد المواقع
يتكون نظام تحديد المواقع GPS من ثلاث وحدات رئيسية هي:
أ. الأقمار الصناعية GPS Satellites
 مركز تحميل صور
مركز تحميل صور
تتسم الأقمار الصناعية في نظامGPS بعدة خصائص أهمها:
(1) يبلغ وزنها حوالي 845 كجم.
(2) يصل عمرها الافتراضي إلى سبع سنوات ونصف.
(3) يتمثل مصدر طاقتها في بطاريات تُشحن بالطاقة الشمسية، تبلغ مساحتها 7.25 م2.
(4) تدور حول الأرض في كل 12 ساعة.
(5) يبعد القمر الصناعي عن سطح الأرض بمسافة تصل إلى 20200 كم.
ويتمثل دور القمر الصناعي في تحديد المواقع من خلال الوظائف التالية:
(1) استقبال وتخزين البيانات المُرسلة من محطة التحكم.
(2) الحصول على التوقيت الدقيق عن طريق ساعات الروبيديوم والسينيزيوم.
(3) إرسال المعلومات للمُستخدم عن طريق إشارات مختلفة.
(4) المناورة لتعديل المدار عن طريق التحكم الأرضي.
ب. نظام التحكم الأرضي GPS Ground Control Segment
ب. نظام التحكم الأرضي GPS Ground Control Segment
يتكون نظام التحكم الأرضي من خمس مراكز موزعه على أنحاء الكرة الأرضية وهي من الغرب إلى الشرق
 مركز تحميل صور
مركز تحميل صور
هاواي Hawai وإحداثياتها 46 َ 19 ْ شمالاً، 30 َ 155 ْ غرباً، وكولورادو اسبرنجز(51 َ 38 ْ شمالاً، 49 َ 104 ْ غرباً) Colorado Springs، اسينيشن (0 َ 8 ْ جنوباً، 0 َ 13 ْ غـرباً) Ascension ، ودييجـو جارسيا (20 َ 7 ْ جنوباً، 26 َ 72 ْ شرقاً) Diego Garcia وكـوا جوالين (54 َ 00 ْ جنوباً، 5 َ 136 ْ شرقاً) Kwa Jwlein. وهذه المراكز معلومة الموقع بدقة عالية تبلغ نحو عشرة سنتيمترات بالزيادة أو النقصان (±10 سم) من مراكز الأرض وتعرف هذه المركز بمحطات التحكم Tracking Stations ، وتشرف عليها البحرية الأمريكية. وتحتوي هذه المحطات الخمسة على أجهزة تحديد المواقع، وأجهزة رصد للأحوال الجوية، وتُرسل هذه الأرصاد يومياً كبيانات للمحطة الرئيسية في كولورادو سبرنجز في الولايات المتحدة الأمريكية.
ج. جهاز الاستقبال Receiver
يعد جهاز الاستقبال الآلة الوحيدة التي تُمكن مُستخدم هذا النظام من الحصول على المعلومات سواء معلومات عن تحديد الموقع أو معلومات عن الأقمار الصناعية، ويتكون جهاز الاستقبال من وحدتين رئيسيتين هما معدات الاستقبال Hardware ، وبرامج المعالجة Software.
3. الحالات الرئيسية لتحديد الموقع بواسطة نظام GPS
هناك حالتان رئيسيان لتحديد الموقع باستخدام نظام تحديد المواقع GPS هما:
أ. التحديد المطلق للموقع Absolute Point Positioning
تُعرف عملية تحديد الموقع لنقطة ما دون الاعتماد على نقطة أو نقاط أخرى بالتحديد المطلق ويتطلب الأمر في هذه الحالة جهازاً واحداً فقط، إضافة إلى بعض البيانات الأولية للموقع. ويمكن في هذه الحالة الحصول على إحداثيات الموقع الجغرافية (خطوط الطول ودوائر العرض) في الميدان مباشرة بدون أي عمليات تحليل أو معالجة. وهناك العديد من الأجهزة التي تُستخدم في هذه الحالة، مثل أجهزة الملاحة التي تحدد المواقع بدقة أفقية تصل إلى ثلاثين متراً، كما هو الحال بالنسبة لجهاز ماجلان Magellan، وجهاز ترمباك Trimpak.
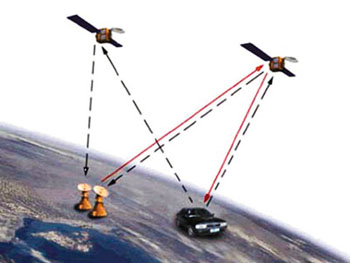
ب. التحديد النسبي للموقع Relative Positioning
تُعرف عملية تحديد الموقع لنقطة ما بالاعتماد على نقطة أو نقاط أخرى بالتحديد النسبي، وتتطلب هذه الحالة وجود جهازين على الأقل، إحداهما ثابت في نقطة معلوم إحداثياتها، والآخر على النقطة المطلوب حساب إحداثياتها بدقة، وتعرف هذه الحالة باسم تحديد المواقع من وضع الثبات Static Positioning . ويتطلب هذا النوع من القياس عمليات تحليل ومعالجة للبيانات التي تم جمعها في الميدان للحصول على الدقة العالية المطلوبة والتي تصل إلى ملليمترات.
وتجدر الإشارة إلى أنه يمكن تحديد الموقع حركياًًKinemetic Positioning حيث يتم تحديد المواقع للجهاز المتحرك وبدقة أعلى من دقة التحديد المطلق.
وهذا النوع مهم في أغراض الملاحة البحرية.
وازدادت المشكلة سوءاً حينما بدأ الإنسان في اكتشاف المحيطات، حيث أنه لا يوجد مكان لوضع العلامات الحجرية، ولا علامات أرضية يسترشد بها، وكانت النجوم هي وسيلته الوحيدة التي يعتمد عليها، لكنها بعيدة جداً، إضافة إلى اختلاف درجة وضوحها من موقع إلى آخر، ومن ثم فإن الطريقة الوحيدة للاستفادة منها هو استحداث طرق دقيقة للقياس، وبالطبع فإن أجراء مثل هذه القياسات لا يتم إلاّ في الليل، وفي الليالي الصافية الخالية من السحب فقط، وباستخدام أدق أجهزة القياس، وعلى الرغم من ذلك فإن هذه الأجهزة تعطي نتائج تقريبية بفارق قد يصل إلى الميل بالزيادة أو النقصان.
وحاول الإنسان في العصر الحديث بكل إمكانياته التقنية والتكنولوجية الاعتماد على نُظم متقدمة إلاّ أنه ثمة صعوبات تواجهها. فهناك نظامان هما لوران LORAN، ودكا DECCA يستخدمان في الملاحة البحرية، ويعملان على أساس نظم الراديو التي تعتبر جيدة الاستخدام في النطاقات الساحلية حيث تتوافر شبكات الاتصال بين النظامين، إلاّ أنها لا تغطي مساحات كبيرة من اليابس؛ فضلاً عن أنها تتسم بتفاوت دقتها حسب الاختلافات المكانية.
وهناك نظام جديد يعتمد على الأقمار الصناعية على نمط نظام تحديد المواقع GPS يُعرف بنظام الانتقال Transit System، أو بنظام الملاحة باستخدام الأقمار الصناعية (Sat – Nav)، لكن الأقمار الصناعية التي يستخدمها تدور في مدارات منخفضة، فضلاً عن أنه لا يوجد عدد كبير منها وبالتالي لا يمكن الحصول على نتائج محددة بصفة دائمة بسبب ترددات أجهزتها الصغيرة، كما أن أي تحرك بسيط لجهاز الاستقبال يسبب أخطاء فادحة في تحديد الموقع
أولاً: النظام ومكوناته وحالات استخدامه
1. نظام تحديد المواقع GPS
في عام 1973م بدأ العمل في وزارة الدفاع الأمريكية لتصميم نظام تحديد المواقع، وذلك لاستبدال نظام الملاحة بالأقمار الصناعية المعروف باسم Transit System أو Sat - Nav، وذلك لتفادي عيوبه الممثلة في تغطيته غير الكافية للأقمار الصناعية، وعملياته الملاحية غير الدقيقة. لذا أُستحدث النظام الجديد ليوفر تغطية كاملة وبدقة عالية تغطي الاحتياجات العسكرية. ويتم التحكم في النظام عن طريق القوات الجوية العسكرية، فضلاً عن أن هذا النظام يتوافر للاستخدامات المدنية ويتغلغل في مختلف أوجه الحياة، حيث أن له العديد من التطبيقات الأرضية والبحرية والجوية، كما سيتضح فيما بعد.
وقد تم إطلاق أول قمر صناعي من هذا النوع عام 1978م، ويعتمد هذا النظام على شبكة مكونة من 24 قمراً صناعياً تدور في مدارات على ارتفاع شاهق حول الكرة الأرضية، وتبدو كأنها نجوم صناعية Man - Made Stars تحاول أن تحل محل النجوم الطبيعية التي كان يعتمد عليها في الملاحة
وتتوزع هذه الأقمار الصناعية في مداراتها المخصصة لها بزوايا ومسارات وزمن محدد لكل منها، بحيث يمكن الاتصال مع أربعة أقمار صناعية على الأقل في أي مكان من العالم.
واستحق هذا النظام ما أُنفق عليه فهذه الأقمار الصناعية تدور على ارتفاعات شاهقة مما يجعلها تتفادى المشاكل والمصاعب التي كانت تواجه محطات التوجيه الأرضي، فضلاً عن أنها تعطي نتائج عالية الدقة في تحديد المواقع على سطح الأرض على مدار 24 ساعة يومياً، إذ أنها يمكن أن تعطي قياسات دقيقة للغاية، حيث يمكـن للمساحيين Surveyors باستخدام أجهزة تحديد المواقعGPS الحصول على قياسات تصل دقتها إلى أقل من السنتيمتر الواحد وهو ما تفتقده الأجهزة المساحية التقليدية.
وأفضل ما تتيحه هذه التقنية الحديثة هو إمكانياتها، ورخص سعرها، وصغر حجمها، وسهولة الحصول عليها، ويمكن القول إنه تم إنجاز إحدى احتياجات الإنسان، حث ستصبح هذه الخدمة من الأساسيات كالهاتف مثلاً، حيث إنها تُمكن المُستخدم من معرفة موقعه في أي مكان وفي كل وقت، إضافة إلى أن هذه الخدمة الجديدة سوف تساعد سيارات الطوارئ من تأدية عملها بسرعة أعلى وبدقة أكبر، حيث إنها ستزود بخرائط إلكترونية Electrons Maps توضح لها مسارها نحو الهدف.
2. مكونات جهاز تحديد المواقع
يتكون نظام تحديد المواقع GPS من ثلاث وحدات رئيسية هي:
أ. الأقمار الصناعية GPS Satellites
تتسم الأقمار الصناعية في نظامGPS بعدة خصائص أهمها:
(1) يبلغ وزنها حوالي 845 كجم.
(2) يصل عمرها الافتراضي إلى سبع سنوات ونصف.
(3) يتمثل مصدر طاقتها في بطاريات تُشحن بالطاقة الشمسية، تبلغ مساحتها 7.25 م2.
(4) تدور حول الأرض في كل 12 ساعة.
(5) يبعد القمر الصناعي عن سطح الأرض بمسافة تصل إلى 20200 كم.
ويتمثل دور القمر الصناعي في تحديد المواقع من خلال الوظائف التالية:
(1) استقبال وتخزين البيانات المُرسلة من محطة التحكم.
(2) الحصول على التوقيت الدقيق عن طريق ساعات الروبيديوم والسينيزيوم.
(3) إرسال المعلومات للمُستخدم عن طريق إشارات مختلفة.
(4) المناورة لتعديل المدار عن طريق التحكم الأرضي.
ب. نظام التحكم الأرضي GPS Ground Control Segment
ب. نظام التحكم الأرضي GPS Ground Control Segment
يتكون نظام التحكم الأرضي من خمس مراكز موزعه على أنحاء الكرة الأرضية وهي من الغرب إلى الشرق
هاواي Hawai وإحداثياتها 46 َ 19 ْ شمالاً، 30 َ 155 ْ غرباً، وكولورادو اسبرنجز(51 َ 38 ْ شمالاً، 49 َ 104 ْ غرباً) Colorado Springs، اسينيشن (0 َ 8 ْ جنوباً، 0 َ 13 ْ غـرباً) Ascension ، ودييجـو جارسيا (20 َ 7 ْ جنوباً، 26 َ 72 ْ شرقاً) Diego Garcia وكـوا جوالين (54 َ 00 ْ جنوباً، 5 َ 136 ْ شرقاً) Kwa Jwlein. وهذه المراكز معلومة الموقع بدقة عالية تبلغ نحو عشرة سنتيمترات بالزيادة أو النقصان (±10 سم) من مراكز الأرض وتعرف هذه المركز بمحطات التحكم Tracking Stations ، وتشرف عليها البحرية الأمريكية. وتحتوي هذه المحطات الخمسة على أجهزة تحديد المواقع، وأجهزة رصد للأحوال الجوية، وتُرسل هذه الأرصاد يومياً كبيانات للمحطة الرئيسية في كولورادو سبرنجز في الولايات المتحدة الأمريكية.
ج. جهاز الاستقبال Receiver
يعد جهاز الاستقبال الآلة الوحيدة التي تُمكن مُستخدم هذا النظام من الحصول على المعلومات سواء معلومات عن تحديد الموقع أو معلومات عن الأقمار الصناعية، ويتكون جهاز الاستقبال من وحدتين رئيسيتين هما معدات الاستقبال Hardware ، وبرامج المعالجة Software.
3. الحالات الرئيسية لتحديد الموقع بواسطة نظام GPS
هناك حالتان رئيسيان لتحديد الموقع باستخدام نظام تحديد المواقع GPS هما:
أ. التحديد المطلق للموقع Absolute Point Positioning
تُعرف عملية تحديد الموقع لنقطة ما دون الاعتماد على نقطة أو نقاط أخرى بالتحديد المطلق ويتطلب الأمر في هذه الحالة جهازاً واحداً فقط، إضافة إلى بعض البيانات الأولية للموقع. ويمكن في هذه الحالة الحصول على إحداثيات الموقع الجغرافية (خطوط الطول ودوائر العرض) في الميدان مباشرة بدون أي عمليات تحليل أو معالجة. وهناك العديد من الأجهزة التي تُستخدم في هذه الحالة، مثل أجهزة الملاحة التي تحدد المواقع بدقة أفقية تصل إلى ثلاثين متراً، كما هو الحال بالنسبة لجهاز ماجلان Magellan، وجهاز ترمباك Trimpak.
ب. التحديد النسبي للموقع Relative Positioning
تُعرف عملية تحديد الموقع لنقطة ما بالاعتماد على نقطة أو نقاط أخرى بالتحديد النسبي، وتتطلب هذه الحالة وجود جهازين على الأقل، إحداهما ثابت في نقطة معلوم إحداثياتها، والآخر على النقطة المطلوب حساب إحداثياتها بدقة، وتعرف هذه الحالة باسم تحديد المواقع من وضع الثبات Static Positioning . ويتطلب هذا النوع من القياس عمليات تحليل ومعالجة للبيانات التي تم جمعها في الميدان للحصول على الدقة العالية المطلوبة والتي تصل إلى ملليمترات.
وتجدر الإشارة إلى أنه يمكن تحديد الموقع حركياًًKinemetic Positioning حيث يتم تحديد المواقع للجهاز المتحرك وبدقة أعلى من دقة التحديد المطلق.
وهذا النوع مهم في أغراض الملاحة البحرية.
التعديل الأخير: