العربات البرية الغير مأهولة
Unmanned ground vehicle
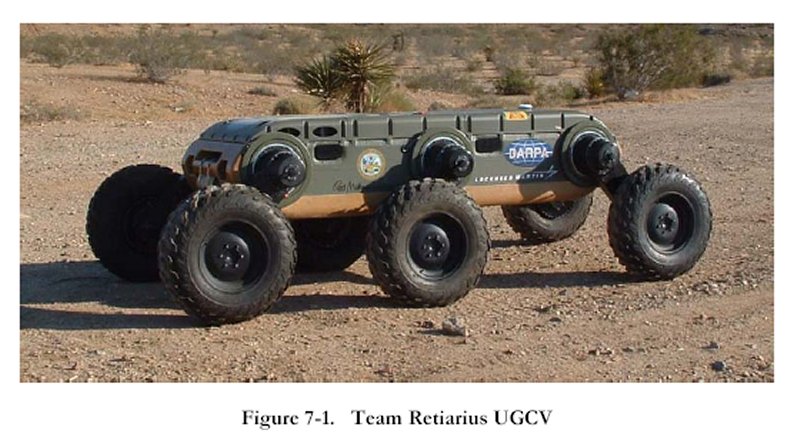
السلام عليكم و رحمة الله و باركاته كنا في موضوع سابق تطرقنا الى الدرونات الطائرة بانواعها المختلفة سواء العسكرية او المدنية في هذا الموضوع الجديد سنتحدث عن العربات البرية الغير ماهولة او ما يطلق عليها بالانجلزية UGV اي Unmanned ground vehicle و يوجد نوع اخر يطلق عليه UGCV بمعني Unmanned ground combat vehicles
تقديم عام
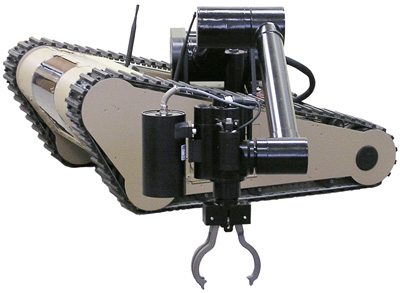
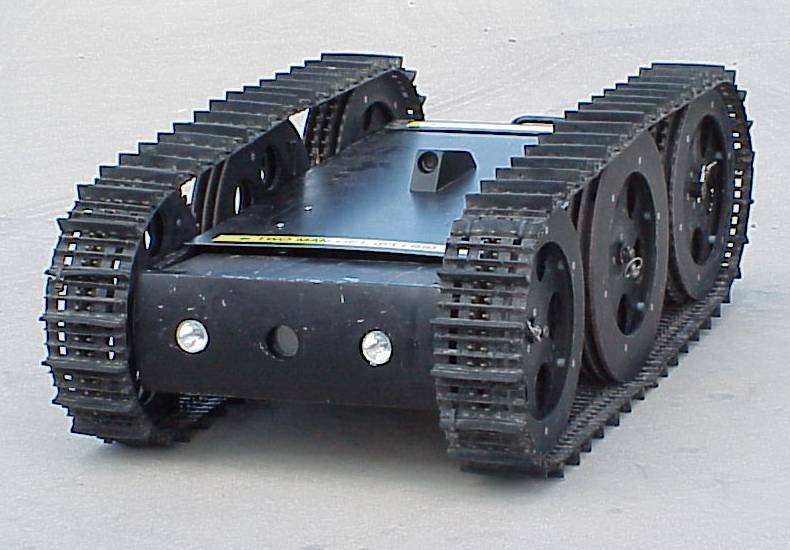
العربات البرية الغير ماهولة هي عربة تعمل من دون وجود سائق بداخلها بحيث تحمل مجموعات من الحساسات التي تمكنها من كشف العوائق امامها و بالتالي ام يتم تعديل المسار من قبل قائد للعربة يكون يتحكم بها عن بعد او تتخذ العربة قرار لوحدها بتعديل مسارها.
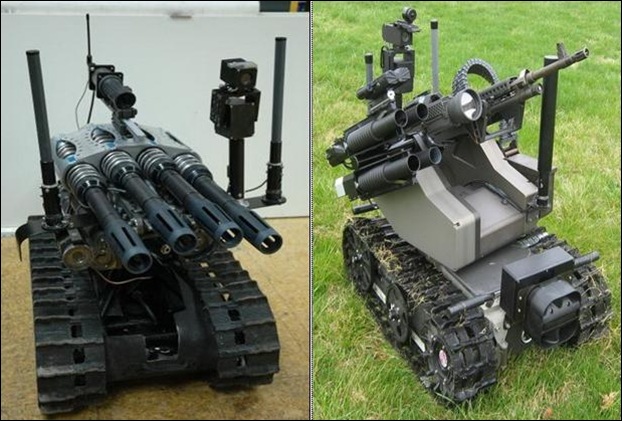
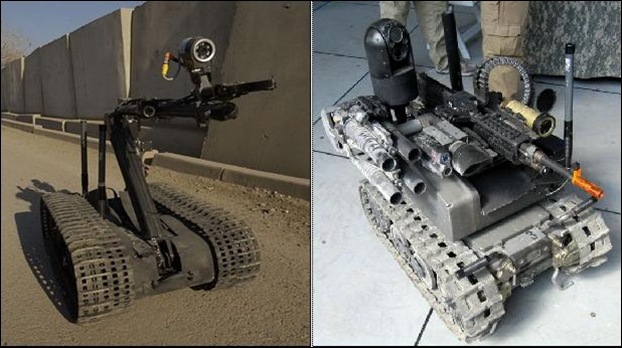
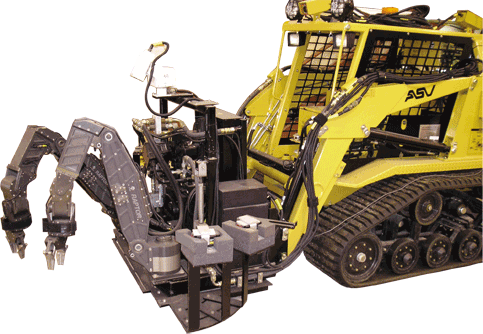
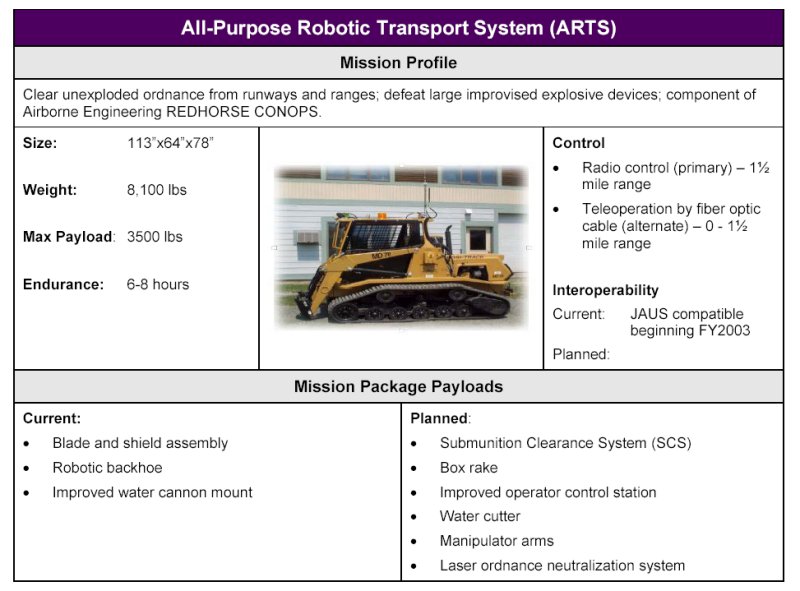
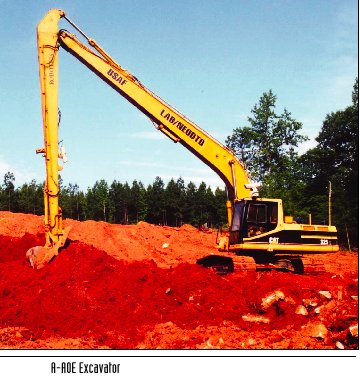
العربات البرية الغير ماهولة تستخدم اليوم لعديد الاغراض سواء منها المدنية او العسكرية.
تاريخ العربات البرية الغير ماهولة
فكرة ايجاد او اختراع عربة برية غير ماهولة ليست بالفكرة الحديثة حيث بدا العمل على المبدا منذ سنة 1921 حيث ظهرت في امريكا اول عربة يتم التحكم بها من خلال جهاز تحكم عن بعد راديو
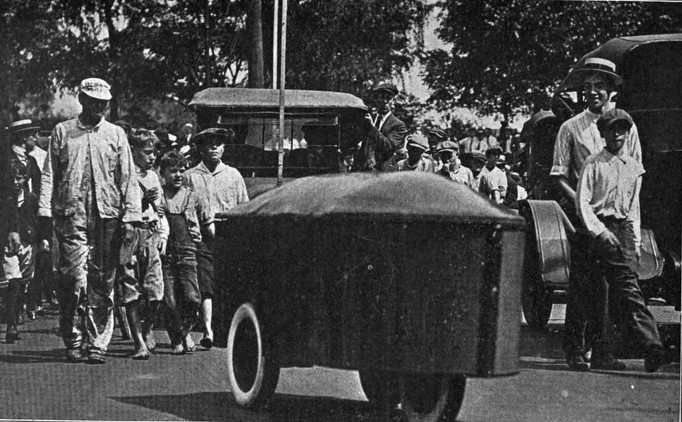
RCA radio controlled car. Dayton, Ohio 1921
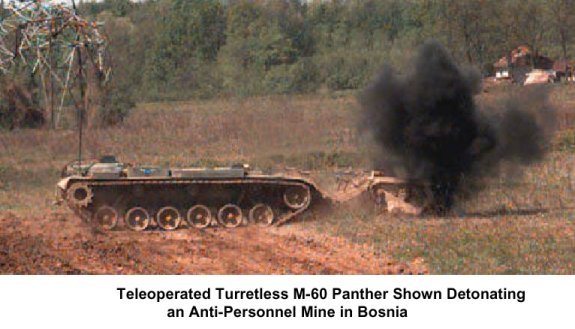
الفكرة طورها في ما بعد الاتحاد السوفياتي سنة 1930 باختراعه لدبابة يتم التحكم بها عن بعد اسمها Teletank و ذلك بهدف تخيف مخاطر المعارك على جنوده و كان يتم التحكم بهذه الدبابة عن طريق الريموت كنترول من داخل دبابة اخرى من مسافة 500 الى 1500 متر و تم استخدامها فعليا في حرب الشتاء Winter War (1939-1940 ) بين الاتحاد السوفياتي و فنلندا و تم استخدامها خلال الحرب العالمية بعد اجتياح المانيا للاتحاد السوفياتي و اتفتاح الجبهة الشرقية

خلال نفس الفترة فترة الحرب العالمية الثانية طور الانقليز بدورهم دبابتهم من طراز Matilda II ليتم التحكم بها عن بعد و لكن سبب التكلفة الباهظة للاجهزة التحكم عن بعد تم الغاء المشروع.

Matilda Mk II
عقب احتلال المانيا لفرنسا سنة 1940 عثر الالمان هناك على مخططات مكنتهم من تصنيع
عربة غير ماهولة سنة 1942 كانت تستخدم لتدمير الدبابات و كان يتم التحكم بالعربة التي تحمل شنة متفجرة زنة 60 كغ عن طريق كابل -سلك-.




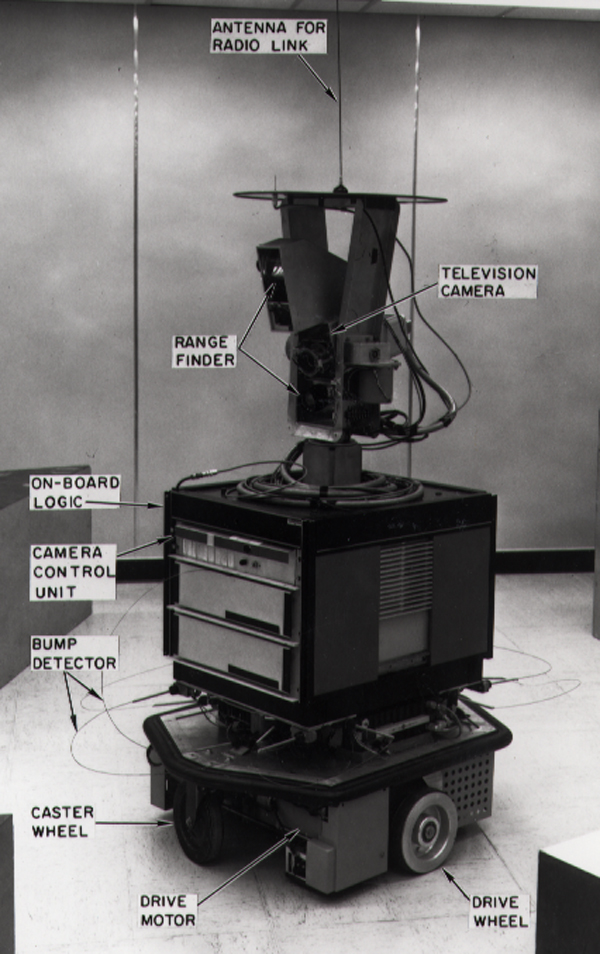
في العصر الحديث سنة 1960 يمكن اعتبار المشروع Shakey من انتاج Defense Advanced Research Projects Agency for Artificial Intelligence (DARPA-AI) البداية الفعلية لعصر الروبوت المتحكم به عن .