تعرف الرادارات بشكل عام..
أول من استعمل الموجات الراديوية للكشف عن وجود أجسام معدنية عن بعد كان
العالم كريستيان هولسماير الذي أظهر عملية كشف
وجود سفينة من خلال الضباب ولكن من غير تحديد المسافة وذلك في عام 1904
أنشأ نيكولا تيسلا رائد علم الكهرباء الأسس المرتبطة بين الموجات ومستوى الطاقة قبل الحرب العالمية الثانية، في أغسطس 1917، وكان الرادار البدائي.
أما الرادار أحادي النبض فقد ظهر في عام 1934 بأمريكا ثم ألمانيا وفرنسا ،وذلك بواسطة إميلي جيراردو ،الذي أظهر أول رادار
فرنسي
حسب تصورات تيسلا الأساسية، في حين أن أول ظهور
للرادار الكامل كان في بريطانيا كدفاع عن أي هجوم
للطائرات وذلك في عام 1935
ازدادت الأبحاث خلال الحرب لإظهار أفضل الرادارات كأسلوب للدفاع حتى ظهرت
رادارات متحركة بمواصفات أفضل. وبالسنوات التي تلت الحرب استخدم الرادار
بقوة في المجال المدني كمراقبة الملاحة
الجوية والأرصاد وحتى بعلم قياسات الفضاء
في الفلك.
الانعكاس
تنعكس الموجات الكهرطيسية (أحيانًا تتبدد)
عند أي اختلاف كبير في ثوابت العزل الكهربائي أو التعاكس المغناطيسي (الديامغناطيسية)، وهذا يعني أن المواد
الصلبة الموجودة بالهواء أو الفراغ أو أي تغيير ملموس بالكثافة الذرية
بين الجسم والبيئة المحيطة به سوف يبدد الإشعاع أو الموجات
الراديوية. وتنطبق على الموصلات الكهربية كالمعادن والألياف الكربونية والتي تساعد الرادار على سهولة الكشف على الطائرات والسفن. المواد التي تمتص الرادار تحتوي على مقاومة ومواد مغناطيسية وتستخدم
بالعربات العسكرية لخفض انعكاس الرادار، وأيضا الأصباغ الداكنة تعمل
نفس العمل.
تتفرق (تتشتت) موجات الرادار بعدة أشكال اعتمادًا على طول الموجة وشكل الهدف. فإذا كان طول الموجة أقصر من حجم الهدف فإن الموجة سترتد باتجاهات متغايرة
كالضوء على المرآة، وإذا كانت الموجة أطول من حجم الهدف فإن الهدف سيكون متقاطب (الشحنات
الموجبة والسالبة منفصلة) مثل الإريال
ثنائي الأقطاب. الرادارات المبكرة استخدمت موجات ذات أطوال عالية أطول
من الهدف مما جعلها تستقبل إشارات مبهمة، لكن الحديثة منها تستخدم أطوال
قصيرة جدا بحيث يمكنها التقاط أهداف بحجم رغيف الخبز. موجات الراديو القصيرة تنعكس من الزوايا والمنحنيات بطريقة مشابهة
للمعان قطعة زجاج مدورة. الأهداف الأكثر انعكاسا للموجات القصيرة لها
زوايا 90 درجة بين الأسطح المنعكسة، الجسم الذي يحتوي على 3 أسطح وتلتقي
بزاوية واحدة كزاوية علبة تعكس الموجات الداخلة
إليها مباشرة إلى المصدر وتسمى بالزوايا العاكسة وهذه الطريقة تستعمل
لتسهيل الكشف الرإداري وتوجد بالقوارب لتسهيل حالات الإنقاذ وتقليل الاصطدامات كما
بالصورة.
طريقة عمل الزوايا العاكسة
ولأسباب مشابهة هناك أهداف تحاول تجنب الكشف الرإداري وذلك بعمل الزوايا لأجسامها بطريقة لمنع الكشف
وتكون حوافها عمودية لاتجاه الكشف مما يقود
لاتجاه العكس كما بطائرة الشبح، ومع ذلك فإن
التخفي لا يكون كاملا بسبب عامل انحراف الموجات وخاصة
للموجات الطويلة.
الرادار
كمية الطاقة للإشارة المرتدة إلى الرادار المرسل
تعطى بالمعادلة التالية:
حيث أن
Pt = الطاقة المرسلة
Gt = زيادة إرسال الهوائي
Ar = مساحة الهوائي المرسل
σ = المقطع العرضي للرادار
F = عامل الانتشار
R = المسافة أو المدى بين المرسل
والهدف
من المعادلة نرى أن كمية طاقة الإشارة المرتدة تضعف إلى مستوى
أقل من ربع طاقة المدى مما يعني أن قوة الإشارة المستلمة تكون ضعيفة
جدا.
عامل الانتشار=1 في حالة الفراغ ويعني إنه لا وجود لأي
تشويش، وهذا العامل ينسب إلى تأثير الانتشار والتضليل وطبيعة البيئة المحيطة وحتى الفقدان خلال
الطريق تؤخذ بالحسبان. بعض المعادلات الرياضية التي تطور الإشارة الرادار تضيف تصنيف زمن
التردد (المويجة) ويستخدم للأهداف
المتحركة
إشارات الرادار المرسلة يكون مجالها الكهربائي متعامد مع اتجاه الموجة
واتجاه هذا المجال يكون هو استقطاب الموجة، فنرى قطبية الرادار إما أفقية
أو عمودي أو على شكل خط مستقيم أو دائري حتى يمكنه الكشف على عدة
أنواع من الانعكاسات، فمثلا الاستقطاب الأفقي يستخدم
لتقليل التشويش الآتي من المطر. الاستقطاب المعاد على خط
مستقيم يستخدم للتعريف على الأجسام المعدنية، الاستقطاب العشوائي المعاد
يدل على الأسطح الصغيرة والكسرات كالصخور والتربة وهذا النوع من الرادار
تستخدم بمراقبة الملاحة
الجوية
نظام الرادار يجب عليه تخطي بعض الإشارات الغير مرغوبة الناشئة من
(مصادر داخلية أو خارجية سواءً سلبية أو إيجابية) حتى تظهر الأهداف
الحقيقية. وتعرف تلك المقدرة على تخطي موجات التشويش بنسبة الإشارة إلى الضجيج. (signal to noise
ratio SNR) كلما كانت النسبة عالية كلما كانت كلما كانت نقاوة الموجة
المستقبلة أفضل
الضوضاء
إشارة الضوضاء هي مصدر داخلي من
الاختلافات المتعددة للإشارة، وتشكلت إلى حد ما من قبل القطع الإلكترونية
الداخلية. وهو مضاف بشكل عشوائي على الموجة المرتدة
بالرادار المستقبل، كلما ضعفت الإشارة المستقبلة كلما زادت صعوبة تطهيرها
من الضجيج، وأفضل مثال على
ذلك هو السماع لهمس بجانب طريق مزدحم. لذلك من الأهمية تقليل تلك الضوضاء بتقليل
عواملها، ويقاس تلك الضوضاء المنتجة داخل الجهاز المستقبل مقارنة مع الجهاز
المثالي وكلما قلت الكمية المقروءة كلما كان الاستقبال أفضل.
هناك ضوضاء ذات مصدر خارجي ويكون عادة من الحرارة الطبيعية المحيطة بالهدف. أنظمة الرادار الحديثة
تكون أجهزة الاستقبال ذات كفاءة بحيث أن الضوضاء الداخلية تكون بسيطة وأقل
نسبة من الضوضاء الخارجية. وأيضا توجد
الضوضاء المتقطعة، تظهر خلال مرور الإلكترونات وتكون ذات علاقة
عكسية مع الموجة بمعنى كلما زادت قوة
الموجة كلما قلت تلك الضوضاء بشكل كبير، الرادار النبضي يستخدم النظام
التمازجي بمعنى اقتران ترددين.
الموجة
المزعجة
الموجة المزعجة أو الفوضوية يرجع مصدرها إلى موجة الراديو الحقيقية، وهي صدى
لموجة تعود من الهدف ولكنها غير مرغوب بها من العامل بجهاز الرادار.
أنواع الأهداف التي تحتوي على الموجة الفوضوية:
أجسام طبيعية كالأرض والبحر
والمنتشرة كالمطر والثلج والأعاصير الرملية
والجوية والحيوانات والتأثير الغلاف الجوي والنيازك الصغيرة وحتى منتوجات البشر كالبنايات أو مضاد الرادار
كالشذرات والخدع الرإدارية.
صورة لمرشد الموجة ويكون موضعه ما بين الإريال وجهاز المرسل المستقبل
موجات مزعجة كما بالصورة تظهر وتختفي
أهداف غير حقيقية أشباح أو خيال
هناك إزعاج يكون بسبب طول كبل مرشد الموجة (waveguide) ما بين جهاز
المرسل-المستقبل (transceiver) وبين الهوائي، بشاشات الرادار ذات
مبين الموقع الإسقاطي (plan position indicator، PPI) عليها
ورادارها الدوار، يكون هناك نقط أشبه بالومضات بمنتصف الشاشة تكون عادة
بسبب صدى الغبار الذي يسبب تغيير بالإشارة الراديوية، معظم تلك الومضات
تكون بسبب انعكاس الموجات المرسلة قبل خروجها من الهوائي. حتى نقلل من تلك
الومضات نعيّر التوقيت ما بين لحظة الإرسال واللحظة التي يبدأ الاستقبال
بالعمل.
بعض الموجات المزعجة تكون غير معرفة لبعض الرادارات، مثال على ذلك" غيوم الأعاصير" لا يتعرف عليها رادار الدفاع الجوي ولكنها معرفة
برادارات الأرصاد الجوية، بتلك
الحالة تعتبر هذه الموجة سلبية بسبب عدم الحاجة لها. توجد عدة طرق لكشف وتحييد تلك
الموجات التي تعتبر بتلك الحالة مزعجة، وتعتمد تلك الطرق على أن الموجة
المزعجة تظهر ثابتة خلال الكشف الرإداري لذلك عند مقارنة تسلسل صدى
الكشف نرى الموجات المرغوبة تتحرك بينما جميع الصدى الثابت ستزال من الشاشة.
موجات البحر الفوضوية تقلل بواسطة الاستقطاب الأفقي والمطر يقلل بواسطة الاستقطاب الدائري، يجب الملاحظة أنه بحالة
رادار الأرصاد الجوية تلك الأشياء تكون مطلوبة لذلك يستعمل استقطاب الخط المستقيم لكشف المطر والبحر وغيرهما. هناك طريقة تسمى Constant
False-Alarm Rate أي ثابت معدل الإنذارات الكاذبة، وهي شكل من ضبط
الزيادة الأتوماتكية ( Automatic Gain Control) وهي تعتمد على حقيقة
أن صدى الموجات الفوضوية الراجعة أكثر بكثير من صدى الأهداف
المرغوبة، لذلك زيادة الجهاز المستقبل سيعدل أتوماتيكيا للمحافظة على
المعدل الثابت للموجات للفوضوية المرئية، وقد لايمكنه العمل بكفاءة في حالة
استقبال هدف يكون مغلف بموجة فوضوية قوية ولكنه له المقدرة على تمييز مصدر
الموجات القوية. بالسابق ضبط الزيادة الأتوماتيكي كان يتحكم إلكترونيا
ويؤثر على الزيادة على إجمالي المستقبل، لكن حاليا ضبط الزيادة الأتوماتيكي
اصبع مبرمج ويسيطر على الزيادة مع قابلية أكثر للتعديل للكشف عن خلايا محددة بالرادار.
هناك موجة فوضوية قد تنشأ من صدى ذو مسارات متعددة من هدف حقيقي وذلك
بسبب الانعكاسات الأرضية والغلاف الجوي أو انعكاس الغلاف الأيوني، هذا
النوع من الموجات الفوضوية مزعجة للبعض بسبب أنها تتحرك وتتصرف كهدف حقيقي،
مما ينتج ما يسمى الأشباح
أو الخيال.
وستتصرف كالتالي: صدى الطائرة إلى الرادار هو انعكاس
من عدة اتجاهات من الأرض ومن فوق الهدف يظهر بجهاز
الاستقبال كهدف حقيقي تحت الهدف الأصلي قد يحاول الرادار أن يوحد الأهداف
معطيا للهدف ارتفاع غير حقيقي أو قد يمنعها بالمرة وهو الأسوأ بسبب
اختلاف المعطيات للهدف أو تطبيقات غير ممكنة. تلك المشاكل ممكن التغلب
عليها بواسطة دمج الخريطة بالرادار ومنع جميع
أنواع الصدى التي تظهر تحت الأرض أو فوق ارتفاع معين. الأنواع الحديثة من أجهزة الرادارات
الأرضية للمطارات تستخدم الخوارزميات للتعرف على
الأهداف المزيفة بواسطة مقارنة النبضات
الآتية حديثا مع المجاورة معها، مثل حساب الراجع الغير محتمل مثل حساب
الارتفاع والمسافة والتوقيت ما بين الإرسال والاستقبال.
التشويش
تشويش الرادار مصدره موجات راديوية ناشئة من خارج نظام الرادار، ترسل
على موجة الرادار فيخفي الأهداف المرغوبة. التشويش قد يكون متعمدا كسلاح
مضاد للرادار في تكتيكات الحروب الإلكترونية، وقد يكون غير متعمد مثل
النيران الصديقة أجهزتها تعمل على نفس الموجة الرإدارية. ينظر إلى التشويش
بأنه قوة تداخل فعالة لأنها تنشئ من عناصر خارج النظام وغير مرتبطة بإشارات الرادار.
التشويش مشكلة معقدة لأن الموجة المشوشة تحتاج إلى ذهاب إلى الرادار
المعني دون الحاجة للرجوع، بينما موجة الرادار يرحل ذهاب وإياب الرادار-الهدف-الرادار
فتقل قوته بشكل ملموس مع عودته للمستقبِل. أجهزة التشويش تحتاج إلى طاقة
أقل من أجهزة الرادار ولكنها تبقى ذات فعالية قوية لإخفاء الأهداف خلال خط
البصر (line of sight) من المشوش إلى الرادار (فص التشويش الرئيسي،
Mainlobe Jamming). المشوش يكون معه تأثير مضاف إلى تأثير الرادار على طول
خط البصر خلال استقبال الرادار ويسمى "فص التشويش الجانبي"
(Sidelobe Jamming). فص التشويش الرئيسي ممكن تقليله بتضييق الزاوية المجسمة له، ولكن لا يمكن
إزالتها خاصة عندما تواجه مباشرة المشوِش الذي يستخدم نفس الموجات ونفس
الاستقطاب الذي يستخدمه الرادار. الفصوص الجانبية للتشويش ممكن التغلب
عليها بواسطة تصميم هوائي يقلل استقبال الفصوص الجانبية واستخدام هوائي
لجميع الاتجاهات (omnidirectional antenna) لكشف وإهمال إشارات
الفصوص الجانبية. التقنيات الأخرى المضادة للتشويش مثل الاستقطاب وقفزات
التردد (frequency hopping، وهي تغيير التردد بتسلسل عشوائي يعرفه
المرسل والمستقبل فقط). التداخل حاليا أصبح مشكلة للنطاق C-band
الذي تستخدمه الأرصاد الجوية على موجة 5.4 جيجا هرتز مع تقنية الواي فاي.
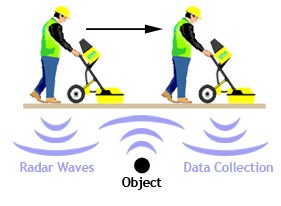
تجهيز
إشارة الراديو
قياس
المسافة
وقت العبور
رحلة الموجة ذهاب وإياب
طريقة واحدة لقياس بعد الهدف وهي إرسال نبضة قصيرة من موجة الراديو (إشعاع كهرومغناطيسي)
ثم حساب الوقت حتى عودتها من الهدف وسرعة
الموجة هي سرعة الضوء(186.000 ميل بالثانية) والمسافة تكون نصف الرحلة كلها
(ذهاب وإياب)، لحساب ذلك بدقة يتطلب أجهزة دقيقة.
كما أسلفنا فإن المستقبِل لا يعمل في لحظة إرسال الموجة والسبب هو جهاز "duplexer"
أو المبدل التناوبي، وهو يعمل على تناوب الرادار ما بين إرسال واستقبال
بمعدل زمني محدد سلفا، لمعرفة مسافة الهدف يقاس طول الموجة ضرب السرعة
ونقسم على اثنين، وللكشف على أهداف اقرب يتطلب موجات أقصر.
هناك عامل يفرض استعمال المدى الأقصى، هو عند عودة النبضة من الهدف
بلحظة إرسال نبضة أخرى يجعل المستقبِل لايستطيع التمييز، إذا يجب علينا
إطالة المدى باستخدام وقت أطول بين النبضات أو ما يسمى توقيت تكرار
النبضات (pulse repetition time)، المشكلة أن هذان العاملان
يميلان أن يكونا متضادين، إذ ليس سهلا لدمج موجتان إحداهما قصيرة المدى
والأخرى طويلة برادار واحد، والسبب أن النبضات القصيرة المطلوبة عند الحد
الأدنى للبث الجيد لديها طاقة ضعيفة، ومما يقلل الموجات الراجعة وتكون
الأهداف صعبة الكشف، ولتجنب ذلك نزيد

الرادار النبضي (Pulsed Radar)يعمل الرادار النبضي من خلال إرسال نبضات قصيرة جدا من الموجات الكهرومغناطيسية باتجاه الهدف وبمعدل يتم تحديده بناءا على البعد الأقصى الذي يمكن للرادار أن يقيسه. ويتم تحديد بعد الهدف في الرادار
النبضي من خلال قياس الفترة الزمنية التي استغرقتها النبضة من وقت إطلاقها إلى رجوعها للرادار ومن ثم يتم حساب بعد الهدف من خلال ضرب سرعة انتشار الموجات الكهرومغناطيسية في الفضاء والبالغة ثلاثمائة ألف كيلومتر في الثانية بنصف قيمة الفترة الزمنية المقاسة. ولكي يتمكن الرادار من تحديد بعد الهدف بدون أي التباس (ambiguity) يجب أن تصل النبضة المرتدة قبل إطلاق النبضة التالية وإلا فإن وصولها بعدها سيجعل الأمر ملتبسا على المستقبل لا يدري إن كانت النبضة المرتدة ناتجة عن النبضة المرسلة حديثا أم عن النبضات التي سبقتها. وعلى هذا فإن الرادار المصمم لقياس مدى قد يصل إلى مائة كيلومتر وبدون أي التباس يجب أن لا يزيد معدل النبضات المرسلة عن ألف وخمسمائة نبضة في الثانية. أما أقل بعد يمكن أن يقيسه الرادار فيتحدد من عرض النبضة المرسلة فالرادار النبضي لا يمكنه قياس النبضات التي ترتد في زمن يقل عن عرض النبضة. ولقياس بعد الأهداف القريبة يجب أن يقل عرض النبضة عن قيمة محددة يتم احتسابها من قيمة أقل بعد فعلى سبيل المثال فإن عرض النبضة يجب أن لا يزيد عن سبعة أجزاء من مليون جزء من الثانية. إن تقليل عرض النبضة سيؤدي إلى تقليل كمية الطاقة التي تحتويها وبالتالي سيؤدي إلى تقليل البعد الأقصى للهدف الذي يمكن للرادار أن يكتشفه ولذلك فإنه من الصعب استخدام الرادار النبضي في نفس الوقت لقياس بعد الأهداف البعيدة والقريبة ولذلك يوجد رادارات نبضية بعيدة المدى لا يمكنها قياس بعد الأهداف القريبة وكذلك العكس.

رادار دوبلر (Doppler Radar)
أما سرعة الأهداف المتحركة فيمكن قياسها باستخدام تأثير دوبلر (Doppler effect) والذي مفاده أن تردد الموجة الكهرومغناطيسية المرتدة عن الهدف المتحرك قد يزيد أو ينقص عن تردد الموجة المرسلة بمقدار يتناسب طرديا مع مركبة سرعة الهدف باتجاه الرادار ففي حالة الزيادة فإن الهدف يقترب من الرادار وفي حالة النقصان فإنه يبتعد عنه. ومن الواضح أن سرعة الهدف لا يمكن تحديدها بشكل مطلق إلا في حالة واحدة وهي إذا كان الهدف يتحرك بشكل مباشر نحو الهدف أما إذا كان يتحرك بزاوية عامودية أو مائلة على الخط الواصل بين الهدف وموقع الرادار فإنه من غير الممكن تحديد السرعة المطلقة. ويمكن حساب سرعة الهدف المطلقة بشكل غير مباشر إذا ما تمكنت المعالجات الموجودة في الرادار من تحديد اتجاه سير الهدف والسرعة الشعاعية (radial velocity) التي تم قياسها من خلال رادار دوبلر. ويقوم جهاز موجود في مستقبل الرادار بمقارنة الترددين وإيجاد الفرق بينهما ومن ثم يتم احتساب السرعة الشعاعية بضرب فرق التردد بثابت معين يتم تحديده حسب الوحدات المستخدمة لإظهار السرعة كأن تكون كيلومتر في الساعة. ولا بد من التنويه أن حساب السرعة يكون صحيحا إذا كان الرادار ثابتا أما إذا كان الرادار من النوع المحمول فإن السرعة التي يقيسها للهدف هي السرعة الشعاعية النسبية وهي حاصل جمع السرعتين الشعاعيتين إذا كانا يقتربان من بعضهما وحاصل الطرح في حالة التباعد.


الرادار ذو الموجة المستمرة (Continuous Wave radar)
يعمل الرادار ذو الموجة المستمرة من خلال إرسال موجة كهرومغناطيسية جيبية عالية التردد بشكل مستمر وليس على شكل نبضات كما في الرادار النبضي. ويوجد نوعان من هذا الرادار ففي النوع الأول يكون تردد الموجة المرسلة ثابتا ولا يمكن في مثل هذا الحال قياس بعد الهدف سواء أكان متحركا أم ثابتا ولكن يمكن استخدام هذا الرادار لقياس سرعة الأهداف المتحركة باستخدام تأثير دوبلر. ويستخدم هذا النوع في التطبيقات التي تهتم بسرعة الهدف فقط كما في الرادارات المستخدمة من قبل الشرطة لقياس سرعات المركبات على الطرق ولكي يتمكن الشرطي من قياس السرعة بشكل دقيق عليه أن يوجه الرادار بنفس اتجاه سير المركبة ,وإلا ستكون السرعة المقاسة أقل من السرعة الحقيقية. ولقياس بعد الهدف باستخدام الرادار ذي الموجة المستمرة يتم تعديل تردد الموجة الجيبية بإشارة ذات تردد منخفض لها شكل سن المنشار (Sawtooth wave) بحيث يزداد تردد الموجة الجيبية خطيا من قيمة دنيا عند بداية الدورة إلى قيمة عليا عند نهايتها ويسمى هذا النوع رادار الموجة المتصلة بتعديل التردد (frequency-modulated continuous wave radar). وعندما يقوم المستقبل بمقارنة تردد الموجة المرتدة مع تردد الموجة المرسلة عند لحظة زمنية معينة نجد أن هنالك فرقا بينهما نتيجة للتأخير الزمن في الموجة المرتدة ومن السهل إثبات أن بعد الهدف عن الرادار يتناسب مع الفرق في التردد. ويستخدم هذا النوع من الرادار لقياس بعد الأهداف الثابتة حيث أن الأهداف المتحركة تعمل أيضا على تغيير التردد مما يجعل الأمر ملتبسا على المستقبل فلا يستطيع التمييز فيما إذا كانت الإزاحة في التردد ناتجة عن التأخير الزمني أو عن تأثير دوبلر. ومن الواضح أيضا أن هذا النوع من الرادارات لا يمكنه قياس سرعة الهدف وذلك لنفس السبب. ولذلك فإن رادار الموجة المتصلة بتعديل التردد يستخدم بكثرة في الطائرات لقياس ارتفاعها عن الأرض والذي يسمى راديو مقياس الارتفاع (radio altimeters).



رادار المصفوفة الطورية (Phased Array Radar)
لا يختلف رادار المصفوفة الطورية عن الرادار التقليدي سوى في نوع الهوائي المستخدم والطريقة التي يتم بها مسح الفضاء بشعاع الهوائي. ففي الرادار التقليدي تستخدم الهوائيات الصحنية والتي يتم تدويرها بسرعة معينة لكي تتم عملية المسح بينما يستخدم رادار المصفوفة الطورية هوائيات ثابتة لا تتحرك وتتم عملية مسح الفضاء المحيط بتوجيه الشعاع وتحريكه بطريقة إلكترونية. ويكمن سر هذا الرادار في هوائي المصفوفة الطورية (phased array antenna) وهو عبارة عن مجموعة من الهوائيات البسيطة (dipole antennas) يتم تغذيتها بتيارات يمكن التحكم بشدتها وبأطوارها (phases) بطريقة إلكترونية ومن خلال اختيار شدة التيارات وأطوارها للهوائيات البسيطة يمكن الحصول على شعاع أو أكثر وبأي اتجاه للهوائي الكلي. وتتميز هوائيات المصفوفة الطورية كذلك بقدرتها على تشكيل أكثر من شعاع ويمكن تحريك كل شعاع بشكل مستقل عن بقية الأشعة وهذا يناسب رادارات التتبع (tracking radars). لقد ظهرت فكرة استخدام الرادارات ذات المصفوفة الطورية خاصة في الطائرات الحربية أثناء الحرب العالمية الثانية ولكن لم تنجح محاولات بنائها إلا في الستينات بعد تطور تكنولوجيا الإلكترونيات. لقد أصبح هذا النوع من الرادارات هو المفضل في كثير من التطبيقات بسبب عدم الحاجة لتحريك الهوائيات ميكانيكيا وأكثر ما تستخدم في الطائرات بمختلف أنواعها وذلك لصعوبة وضع رادارات تقليدية على ظهرها.


الرادار ذو الفوهة المصطنعة (Synthetic Aperture Radar (SAR))
يتطلب تصوير بعض الأهداف بحيث تظهر تفصيلات معالمه هوائيات ذات حجم بالغ الكبر وذلك للحصول على شعاع ضيق جدا يمكنه مسح تفصيلات الهدف. وغالبا ما يصعب بناء مثل هذه الهوائيات الكبيرة أو يصعب حملها بالطائرات إذا كان التصوير من الجو. وقد تم التغلب على هذه المشكلة من خلال استخدام مبدأ بسيط وهو أن عددا من الهوائيات الصغيرة الحجم المتباعدة مكانيا والموجهة نحو الهدف يمكن أن تقوم مقام هوائي كبير الحجم شريطة القيام بمعالجة معقدة للإشارات التي تلتقطها هذه الهوائيات من زوايا مختلفة وذلك باستخدام الحواسيب. وقد تم استخدام ما يشبه هذه الطريقة في تصوير المجرات حيث يتم توزيع الهوائيات على مناطق جغرافية متباعدة ويتم معالجة الصور الفردية الملتقطة غير الواضحة للحصول على صورة عالية الوضوح. وكذلك يتطلب تصوير أهداف موجودة على سطح الأرض بدقة واضحة من الجو باستخدام رادارات محمولة بالطائرات هوائيات كبيرة الحجم يصعب في الغالب وضعها على هذه الطائرات. وبدلا من استخدام عدة رادارات موزعة في الجو وهو ما يصعب تحقيقه تقوم طائرة واحدة تحمل رادار بهوائي صغير بالتحرك فوق الهدف وأخذ صور متلاحقة من أماكن مختلفة في الجو وعند معالجة هذه الصور يتم الحصول على صورة رادارية عالية الوضوح. يستخدم هذا النوع من الرادارات في تطبيقات لا حصر لها كالاستشعار عن بعد وفي تصوير الأهداف والمنشئات العسكرية.

الرادار ذو الفوهة المصطنعة (Synthetic Aperture Radar (SAR))
يتطلب تصوير بعض الأهداف بحيث تظهر تفصيلات معالمه هوائيات ذات حجم بالغ الكبر وذلك للحصول على شعاع ضيق جدا يمكنه مسح تفصيلات الهدف. وغالبا ما يصعب بناء مثل هذه الهوائيات الكبيرة أو يصعب حملها بالطائرات إذا كان التصوير من الجو. وقد تم التغلب على هذه المشكلة من خلال استخدام مبدأ بسيط وهو أن عددا من الهوائيات الصغيرة الحجم المتباعدة مكانيا والموجهة نحو الهدف يمكن أن تقوم مقام هوائي كبير الحجم شريطة القيام بمعالجة معقدة للإشارات التي تلتقطها هذه الهوائيات من زوايا مختلفة وذلك باستخدام الحواسيب. وقد تم استخدام ما يشبه هذه الطريقة في تصوير المجرات حيث يتم توزيع الهوائيات على مناطق جغرافية متباعدة ويتم معالجة الصور الفردية الملتقطة غير الواضحة للحصول على صورة عالية الوضوح. وكذلك يتطلب تصوير أهداف موجودة على سطح الأرض بدقة واضحة من الجو باستخدام رادارات محمولة بالطائرات هوائيات كبيرة الحجم يصعب في الغالب وضعها على هذه الطائرات. وبدلا من استخدام عدة رادارات موزعة في الجو وهو ما يصعب تحقيقه تقوم طائرة واحدة تحمل رادار بهوائي صغير بالتحرك فوق الهدف وأخذ صور متلاحقة من أماكن مختلفة في الجو وعند معالجة هذه الصور يتم الحصول على صورة رادارية عالية الوضوح. يستخدم هذا النوع من الرادارات في تطبيقات لا حصر لها كالاستشعار عن بعد وفي تصوير الأهداف والمنشئات العسكرية.
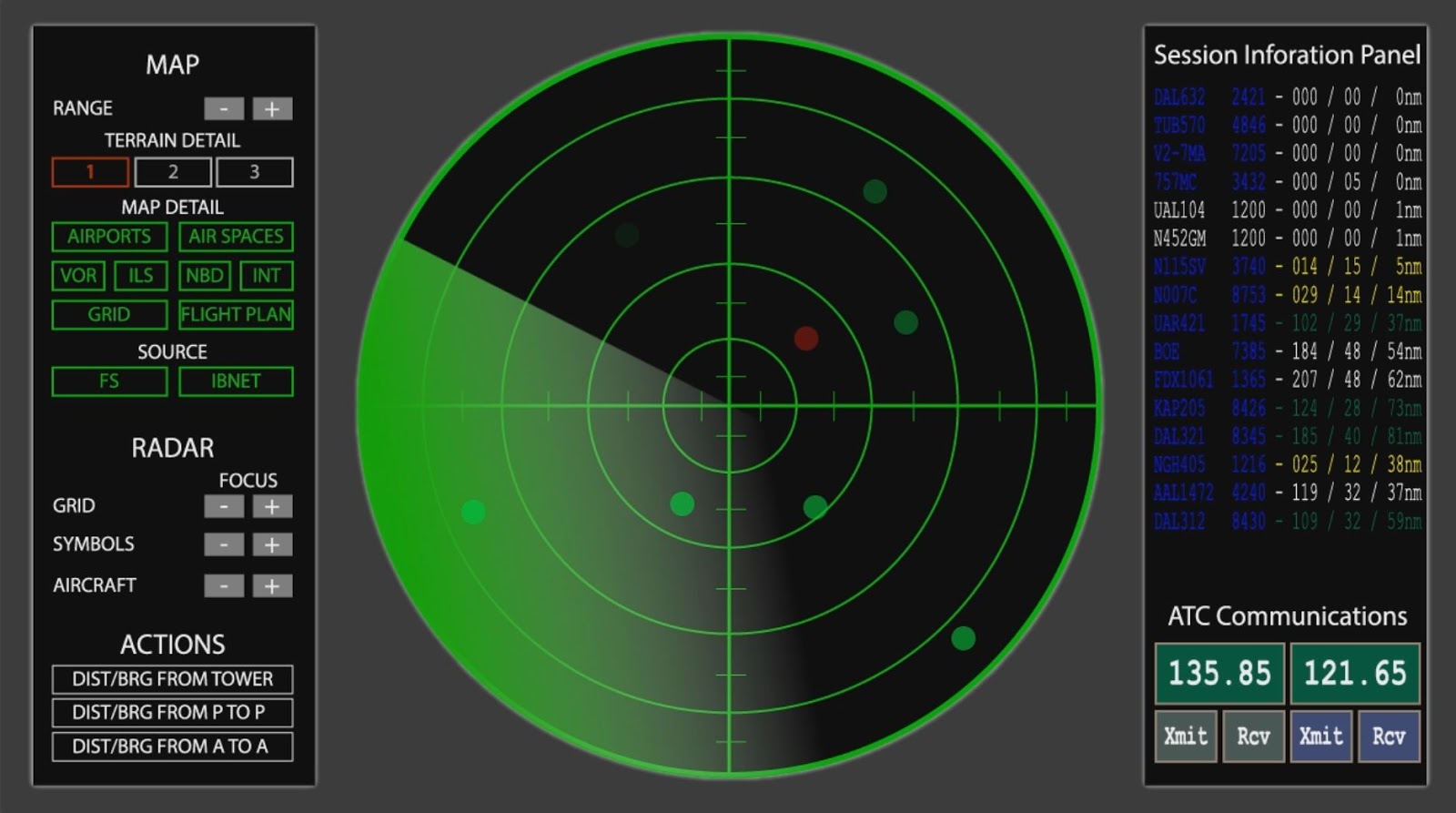
رادار التتبع (Tracking Radar)
تتطلب بعض التطبيقات أن يقوم الرادار بتتبع الهدف المتحرك بعد أن يتم اكتشافه من قبل نفس الرادار أو رادار آخر حيث يتوقف هوائي الرادار عن الدوران ويتم توجيهه نحو الهدف تماما ويتابع حركته باستمرار. وغالبا ما يتم استخدام نظام تحكم بتغذية راجعة سلبية تتحكم بحركة الهوائي لكي يتمكن من متابعة الهدف بشكل دقيق. وأكثر ما تستخدم مثل هذه الأنظمة في التطبيقات العسكرية حيث يتم ربط نظام التتبع بنظام التحكم بمصادر النيران بحيث يتم توجيهها نحو أهدافها بطريقة آلية وما على الجندي إلا الضغط على الزناد لإطلاق النار في الوقت المناسب أو يتم ذلك بشكل تلقائي. وتستخدم هذه الأنظمة في أنظمة الدفاع الجوي والصواريخ قصيرة المدى وفي الأنظمة المضادة للصواريخ وغيرها. وتستخدم كذلك في أنظمة هبوط الطائرات. إن أحد عيوب هذا النظام أن عملية المسح للأهداف الأخرى توقف بمجرد اكتشاف الرادار لأحد الأهداف والقيام بتتبعه وتحل هذه المشكلة إما بوجود رادارات أخرى أو باستخدام نظام التتبع مع البحث (track-while-scan (TWS))

ولكن يلزم في هذه الحالة وجود حاسوب يقوم بتخزين معلومات عن عدد من الأهداف المتتبعة ويمكنه إرسال إشارات لأنظمة التحكم بالنيران لتوجيهها نحو هذه أهداف. ويمكن أن تحل هذه المشكلة أيضا باستخدام رادارات بهوائيات المصفوفة الطورية (phased array antenna). وتتميز هذه الأنواع من الرادارات بأن عملية المسح تتم بطريقة إلكترونية (electronic scanning) حيث لا يلزم تحريك الهوائي كما في الرادارات العادية. وتتميز كذلك بإمكانية برمجة الهوائي ليشكل أكثر من شعاع يستخدم بعضها للمسح وبعضها لمتابعة الأهداف.
ولكن يلزم في هذه الحالة وجود حاسوب يقوم بتخزين معلومات عن عدد من الأهداف المتتبعة ويمكنه إرسال إشارات لأنظمة التحكم بالنيران لتوجيهها نحو هذه أهداف. ويمكن أن تحل هذه المشكلة أيضا باستخدام رادارات بهوائيات المصفوفة الطورية (phased array antenna). وتتميز هذه الأنواع من الرادارات بأن عملية المسح تتم بطريقة إلكترونية (electronic scanning) حيث لا يلزم تحريك الهوائي كما في الرادارات العادية. وتتميز كذلك بإمكانية برمجة الهوائي ليشكل أكثر من شعاع يستخدم بعضها للمسح وبعضها لمتابعة الأهداف.